I'm Aedan Bingham!
Robotics Engineering & Economics student at WPI — building things that drive, fly, and predict!
Robotics Engineering & Economics student at WPI — building things that drive, fly, and predict!

Hey there! I'm a robotics enthusiast and finance wiz who loves building things that move, think, listen, and can model the past to predict the future.
When I'm not tinkering with motors and microcontrollers, you'll find me exploring new tech, dreaming up my next project, and scrubbing data for correlations.
I'm passionate about the intersection of hardware and software — as the world gets evermore complex there is a growing necessity for people who know both, and there's nothing quite like watching a machine you built come to life for the first time!


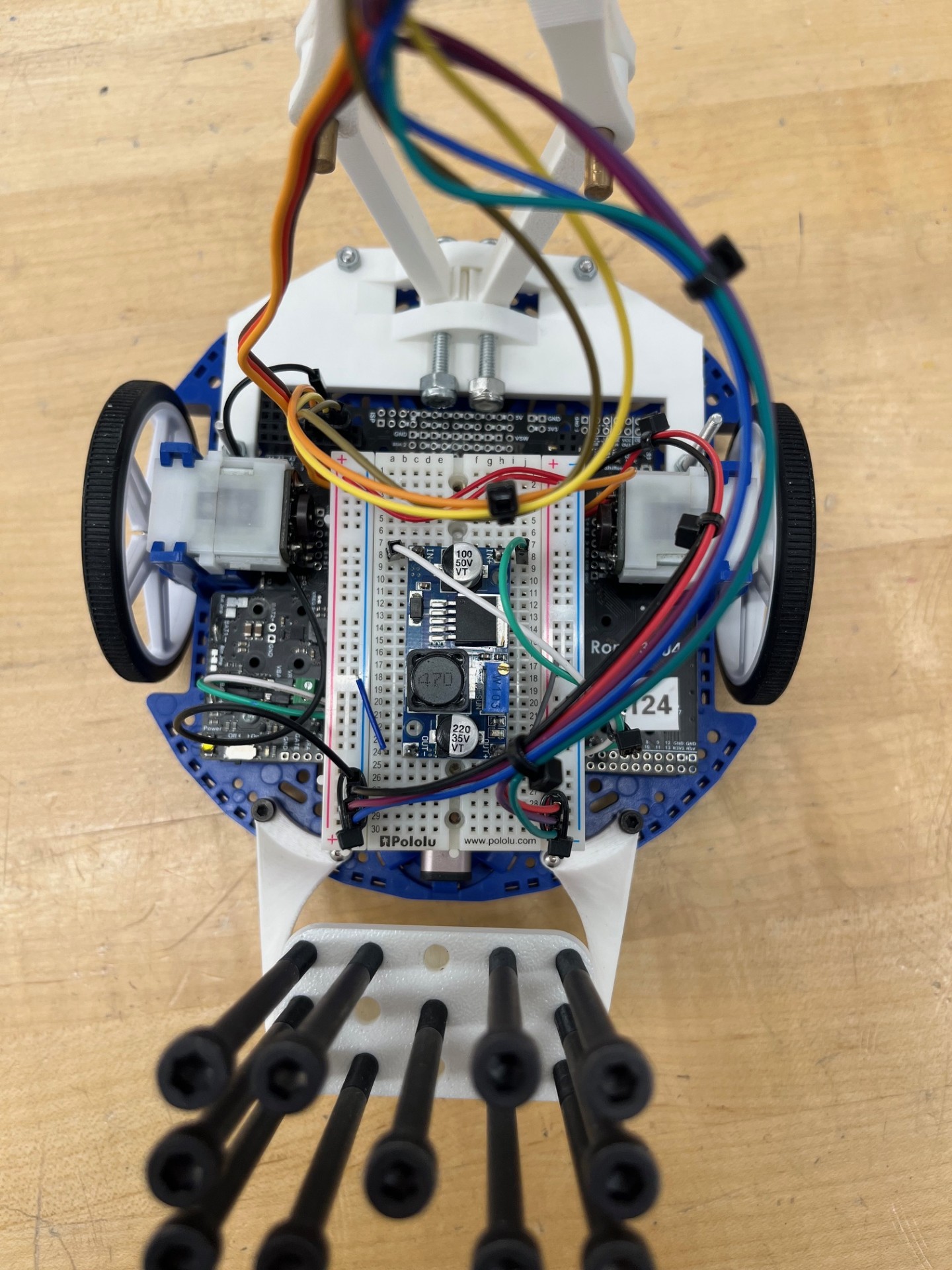
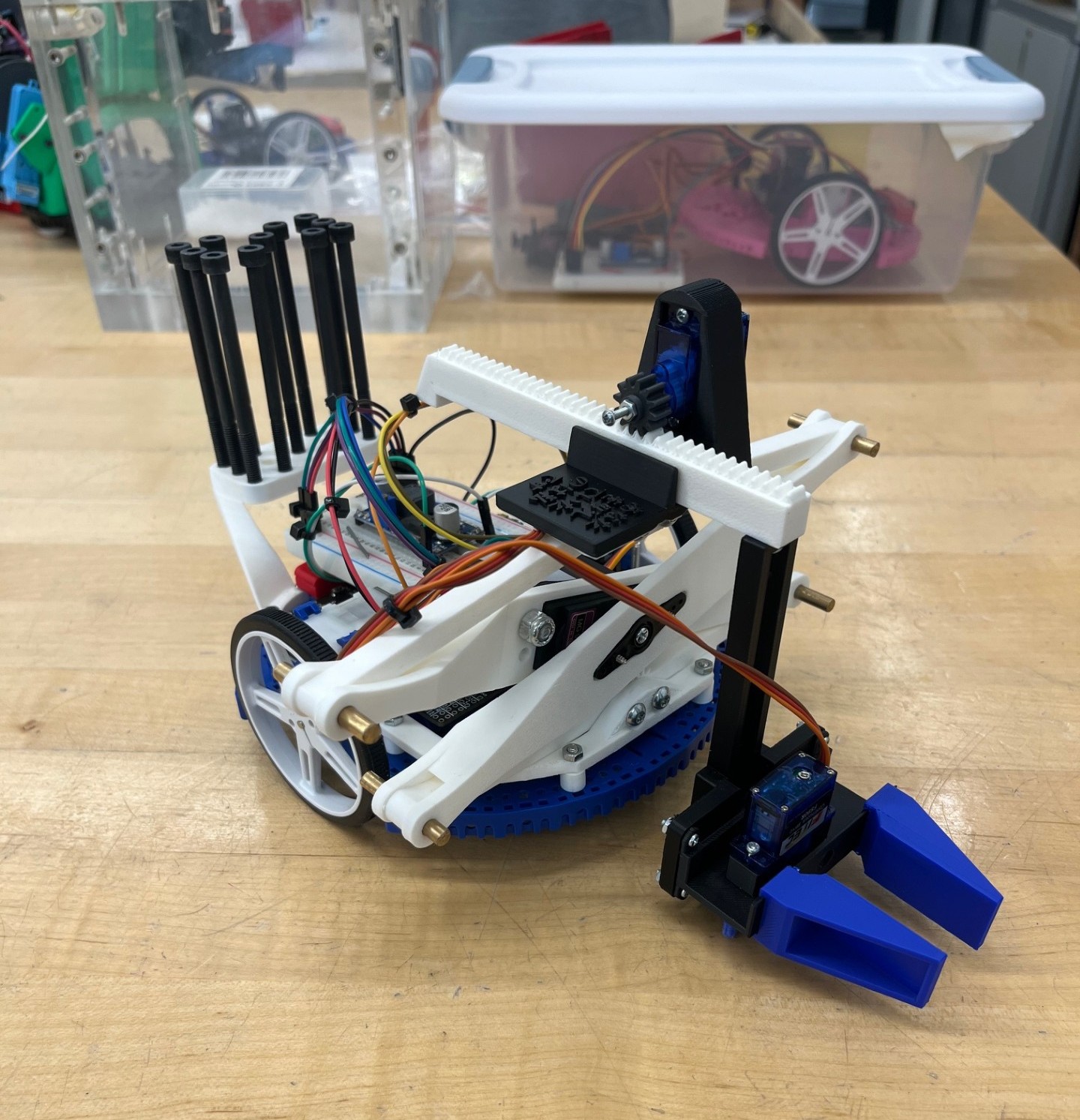
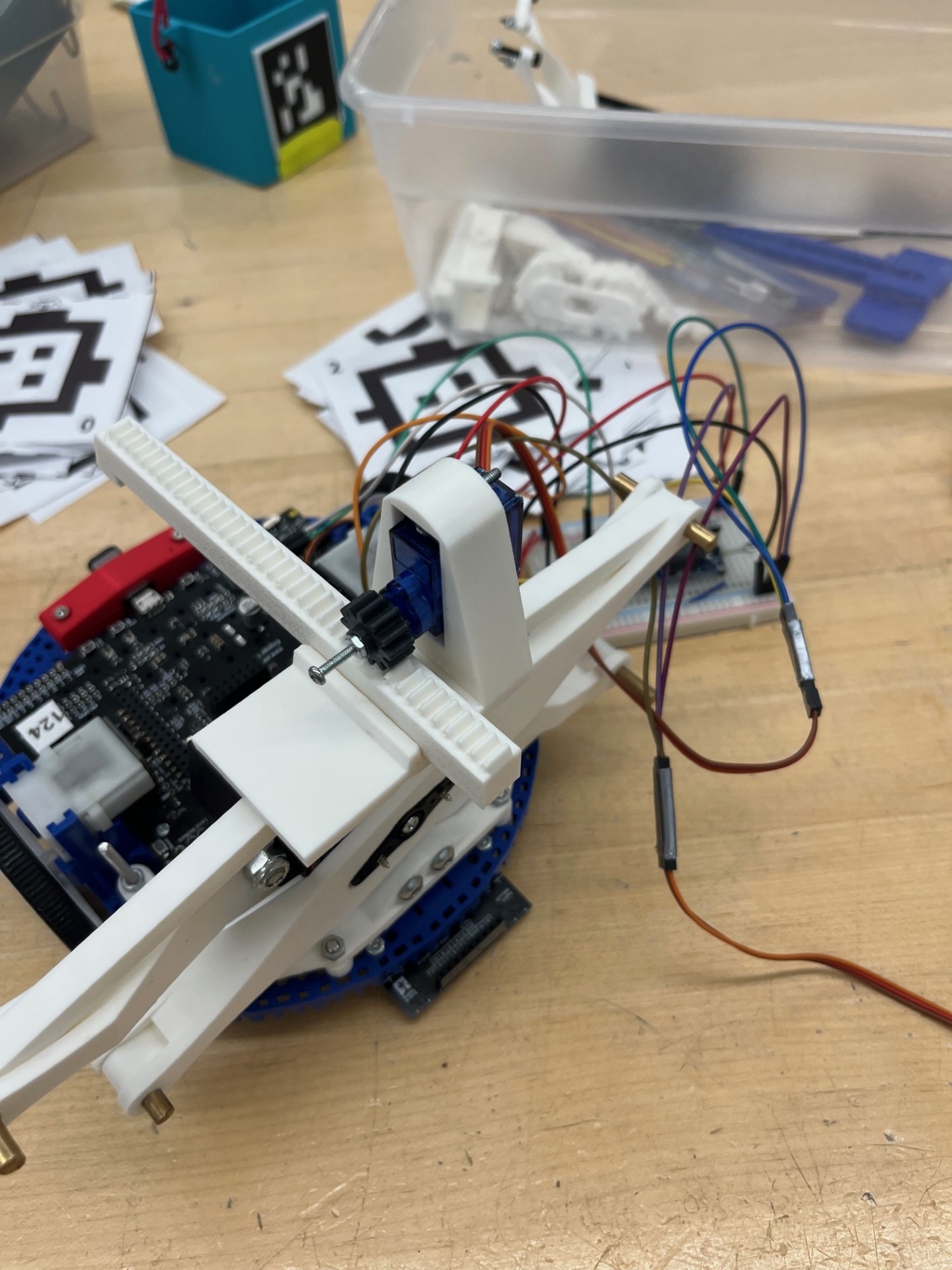
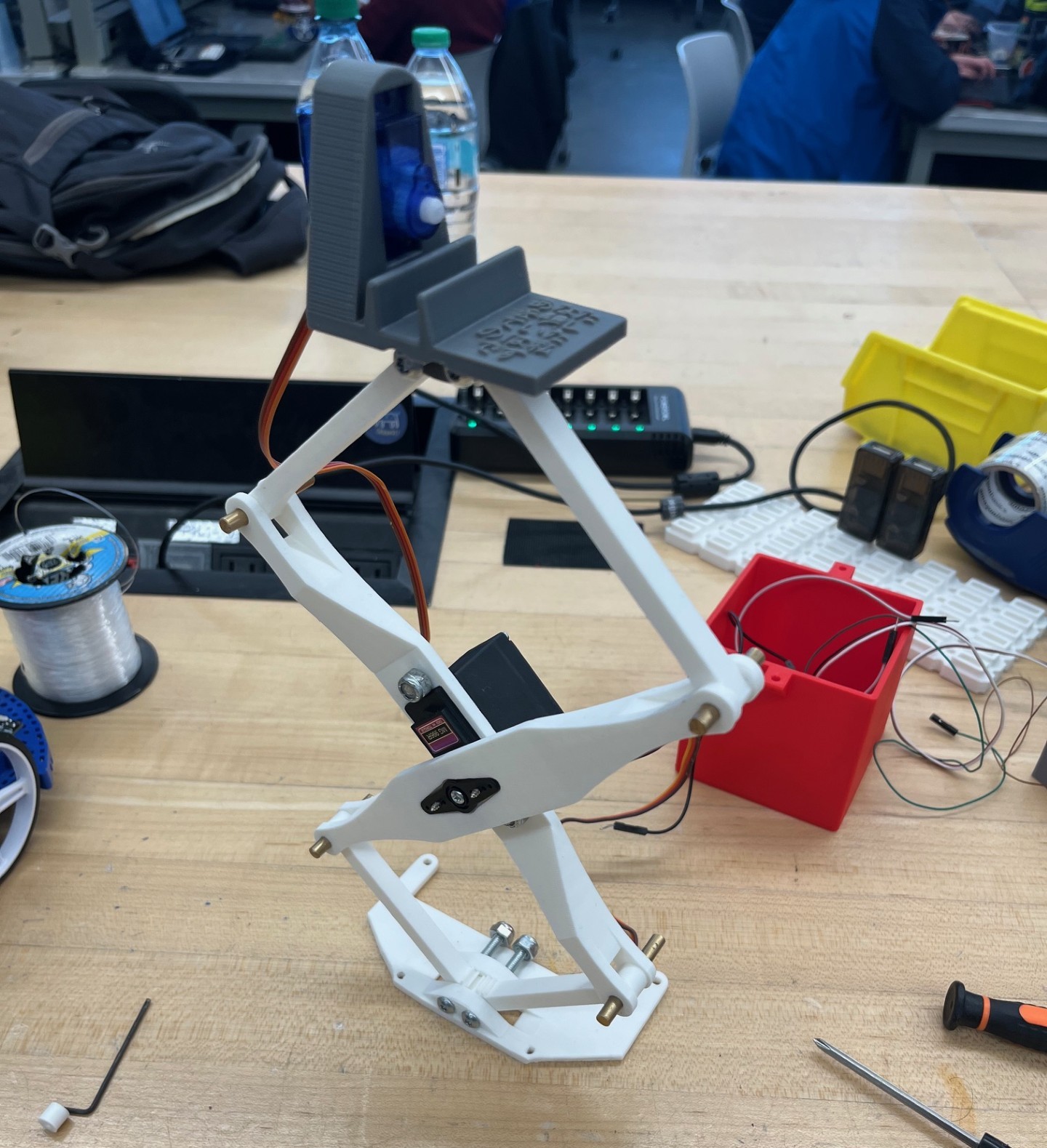
A Romi chassis with 1 mm precision and homemade 3-DOF manipulator. Mechanically, a scissor lift is used for z-axis control, a rack and pinion for the y-axis, and gripper in the x-axis. The software is integrated with forward and inverse kinematics. On the ECE side, a breadboard setup with a buck converter powering three servos.
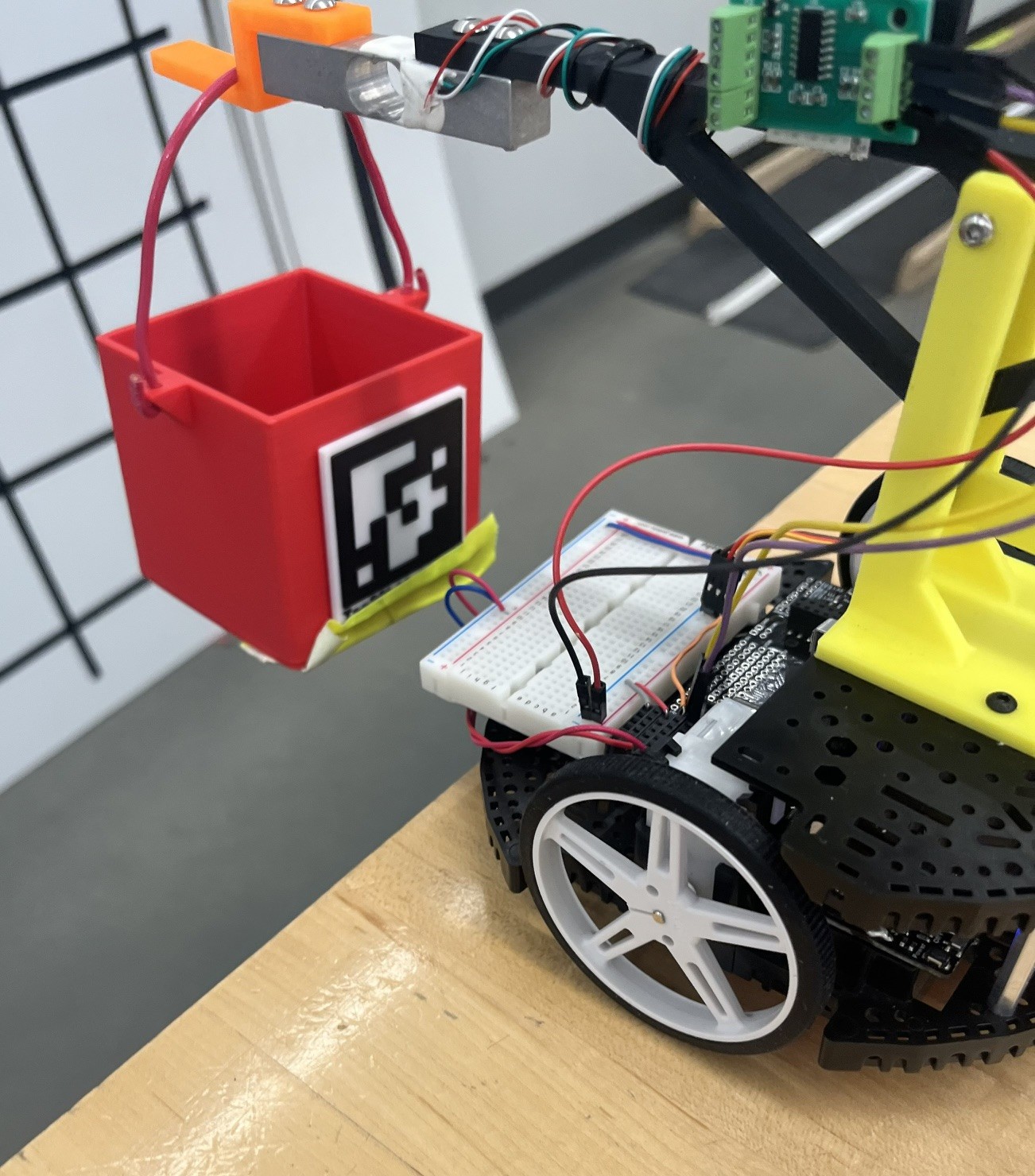
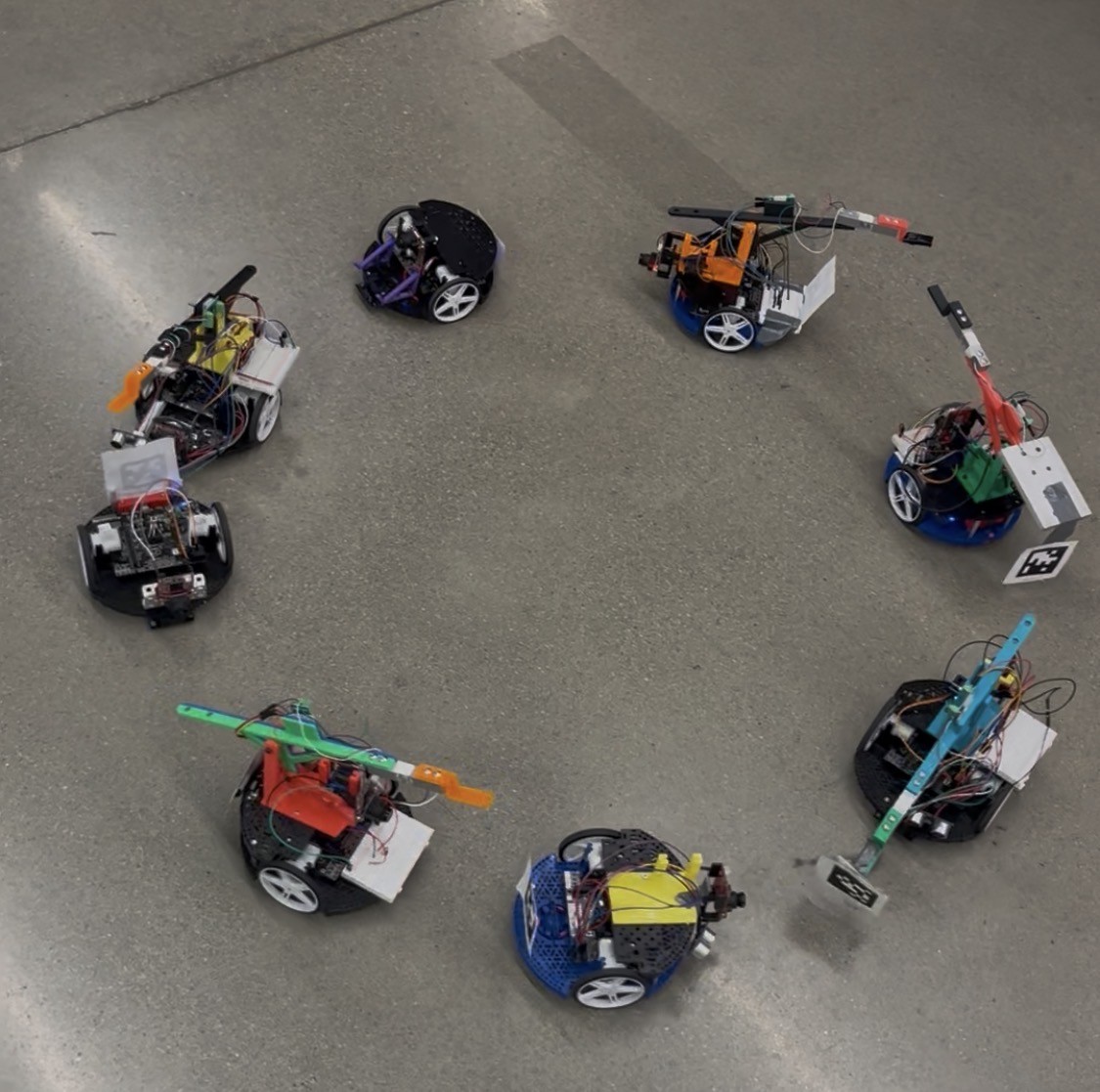
Various sensing and perception systems deployed on a Romi chassis. Autonomous gridspace navigation, line following, dead reckoning, AprilTag following, and teleoperation control. Multiple types of sensors implemented and fused.
For example, distance travelled readings based off encoder counts and ultrasonic readings to improve destination accuracy on low-friction surfaces. As well, driving to points in space and location an AprilTag on a bin, then picking up and weighing that bin to within 0.5g (\omega = 0.055 g), and lastly driving to another set location to drop the bin off.
Git Repository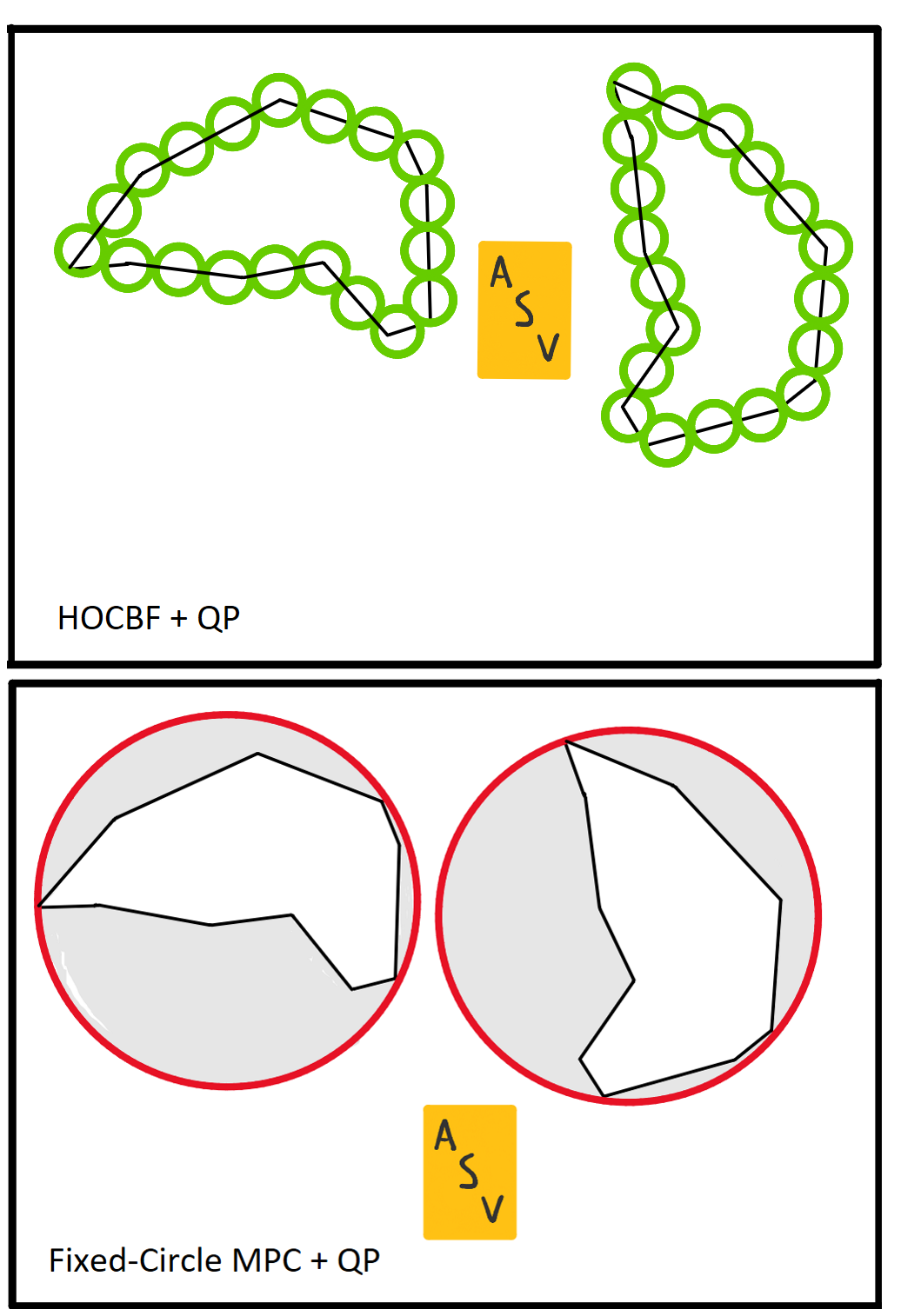
Control Barrier Functions essentially serve to enforce safety properties while optimizing computations in the face of constraints utilizing quadratic programing. On the other hand, Model Predictive Control minimizes a cost function for a system, satisfying present constraints while taking a finite horizon into account. Yet, this approach has considerable trouble when complexity increases. This is why CBFs are best used as a substitute or compliment to MPC.